About me
I am a second-year Ph.D. student in Computer Science at the University of Southern California, working with Prof. Gaurav S. Sukhatme in the Robotic Embedded Systems Laboratory (RESL). My research focuses on the intersection of heterogeneous multi-robot collaboration systems and robot learning, aiming to develop intelligent, collaborative behaviors across diverse robotic platforms.
I earned my M.S. degree in Robotics from Carnegie Mellon University, where I was advised by Prof. Sebastian Scherer in the AirLab. Before that, I completed a B.S. in Electrical and Computer Engineering with a major in Robotics at CMU, working in the Biorobotics Lab under Prof. Howie Choset.
Publications
*: Equal contribution.
Darren Chiu*, Zhehui Huang*, Ruohai Ge, Gaurav S. Sukhatme
ArXiv preprint arXiv:2511.17765, 2025
A safety-guided RL framework enabling resource-constrained multi-UAV navigation in cluttered environments with zero-shot sim-to-real transfer.
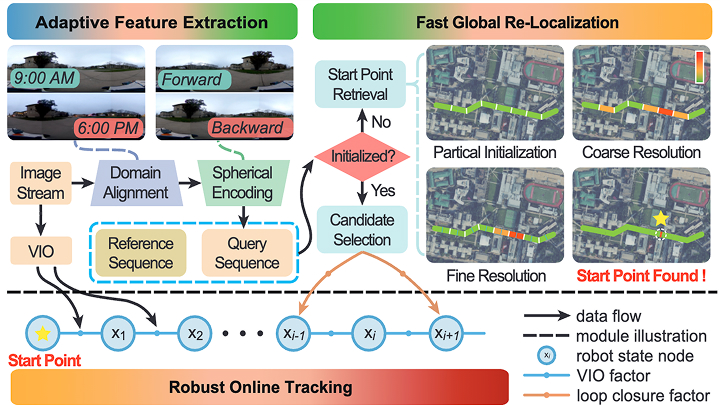
Peng Yin*, Shiqi Zhao*, Jing Wang*, Ruohai Ge, Jianmin Ji, Yeping Hu, Huaping Liu, Jiandan Han
IEEE Transactions on Robotics (T-RO), 2025
An innovative visual localization system for robotic agents, enhancing autonomy in long-term, large-scale applications using stable descriptors unaffected by viewpoint and illumination.
Peng Yin, Shiqi Zhao, Haowen Lai, Ruohai Ge, Ji Zhang, Howie Choset, Sebastian Scherer
IEEE Transactions on Robotics (T-RO), 2023
A framework for assembling and smoothing LiDAR map segments into a complete, city-scale map, even without GPS or initial estimations.
Projects
Feb 2021 - Aug 2022
Report Presentation Demo1 Demo2
This system excels in real-time visual localization, handling challenges like illumination changes, dynamic objects, and random starting points.
Public Dataset
Feb 2021 - Aug 2022
Project Page Manuscript Dataset
A long-term place recognition dataset for mobile localization in dynamic environments, with campus and city tracks.
BioRobotics Lab, Carnegie Mellon University
May 2019 - Sep 2019
Manuscript Demo
Assisted in design and implementation of a three-Link brachiation robot with optimal control based trajectory tracking controller.
BioRobotics Lab, Carnegie Mellon University
Jun 2019 - Dec 2019
Fastener Classification Laser Extraction
Did image classification, feature detection and laser extraction on fasteners on an embedded platform (i.MX RT1064).
CMU 16-264 Humanoids
Feb 2019 - May 2019
Demo Simulation Code
Built a robotic arm for building and adjusting blocks with AI reasoning and computer vision.

Services
Reviewer
- IJRA, RA-L
- ICRA 2026
Workshop Organization
- Co-organizer of Workshop Competition - Closing the Loop on Localization, IROS 2023
- Co-organizer of General Place Recognition Competition, ICRA 2022
Teaching
- CSCI 103 Introduction to Programming, TA, USC, 2026
- CSCI 455 Introduction to Programming Systems Design, TA, USC, 2025
- 18-500 ECE Design Experience , TA, CMU, 2020
- 16-311 Introduction to Robotics , TA, CMU, 2020
- 16-311 Introduction to Robotics , TA, CMU, 2019
- 82-242 Intermediate Spanish II , TA, CMU, 2018